Temperaturmessung
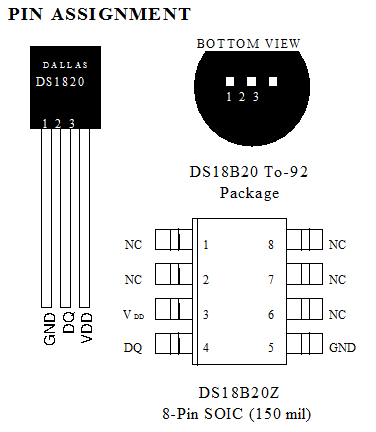
Sensoren: DS1820 bzw. DS18B20 am One wire bus.
Pullup: 4K7
Unterschied zwischen DS1820 und DS18B20
Beim DS1820 ist die Einheit des Temperaturwertes 0.5°C, beim DS18B20 ist es defaultmäßig 1/16°C = 0.0625°C. Entsprechend muss der ausgelesene Wert anders umgerechnet werden.
Beim DS18B20 kann die Auflösung geändert werden von 9-12 Bit. Bei 12Bit dauert die Messung 750ms, bei 9 Bit nur ca. 94ms.
Die Bits 6 und 5 im Konfigurationsregister (Byte 4 im Speicher) legen die Auflösung fest.
Temperaturmessung mit einem Sensor
'Thermometer mit DS18B20 1Wire (12bit-Sensor)
'Pin1 GND, Pin3 an +5V, Pin2 Pullup 4K7 = Datenleitung am uC PortD.5
'Da der Sensor 750ms zum Messen braucht wird hier immer der vorige Wert übertragen
$crystal = 16000000
$regfile = "m8def.dat"
$hwstack = 50
$baud = 9600
'DS18B20
Dim Dsread(9) As Byte
Dim Itemperature As Integer At Dsread Overlay 'enthält Temp. in 0.0625°C
Dim Temperature As Single
Config 1wire = Portd.5
'------------------------------------------------------------------------------
Do
Gosub Measuretemperature
Print Temperature
Wait 1
Loop
'------------------------------------------------------------------------------
Measuretemperature:
'gemessene Temperatur steht in Variable Temperature
'1wire muss vorher konfiguriert sein
'Messen
1wreset
1wwrite &HCC 'alle herhören
1wwrite &H44 'Messen
Waitus 200
'auslesen
1wreset
1wwrite &HCC
1wwrite &HBE 'RAM auslesen
Dsread(1) = 1wread(9) '9 Byte lesen
Temperature = Itemperature * 0.0625
Return
'-------------------------------------------------------------------------------
Adresse des Sensors bestimmen
Jeder Sensor bekommt bei der Herstellung eine feste Adresse, unter der er angesprochen werden kann.
'Thermometer mit DS18B20 1Wire (12bit-Sensor)
'Pin1 GND, Pin3 an +5V, Pin2 Pullup 4K7 = Datenleitung am uC PortD.5
'Adresse lesen
$crystal = 16000000
$regfile = "m8def.dat"
$hwstack = 50
$baud = 9600
'DS18B20
Dim Dsread(9) As Byte
Config 1wire = Portd.5
Dim I As Byte
'------------------------------------------------------------------------------
Do
Gosub Displayaddress
Wait 1
Loop
'------------------------------------------------------------------------------
Displayaddress:
1wreset
'skip ROM, also alle Bausteine ansprechen
' (es ist nur einer da also keine gezielte Adressierung nötig)
1wwrite &HCC
Dsread(1) = 1wsearchfirst()
'8Byte Adresse hex. anzeigen
For I = 1 To 8
Print Hex(dsread(i));
Next I
Print
Return
'------------------------------------------------------------------------------
Mehrere Sensoren an einem Controller
Um die Ansteuerung zu vereinfachen, und einen problemlosen Austausch von Sensoren zu erlauben, werden diese nicht alle an einem Pin des Controllers angeschlossen, sondern jeder Sensor hängt an einem separaten Pin. So kann man die Sensoren über den Befehl &HCC ansprechen („alle herhören!), andernfalls müsste man die genaue Adresse der Sensoren kennen.
'Thermometer mit DS18B20 1Wire
'Pin1 GND, Pin3 an +5V, Pin2 Pullup 4K7 = Datenleitung am uC PortD.7 bzw. PortD.6
'mit Datenausgabe RS232 9600 Baud
$crystal = 16000000
$regfile = "m8def.dat"
$hwstack = 50
$baud = 9600
'DS1820
Config 1wire = Portd.7
Config 1wire = Portd.6
Dim Thpinnr As Byte 'PinNr für die Auswahl der Sensoren
Dim Dsread(9) As Byte
Dim Itemperature As Integer
Dim Temperature As Single
Dim S As String * 5
'------------------------------------------------------------------------------
Do
' erster Sensor
Thpinnr = 7
Gosub Measuretemperature
Print Temperature;
Print Chr(9);
' zweiter Sensor
Thpinnr = 6
Gosub Measuretemperature
Print Temperature;
Print
Wait 1
Loop
'------------------------------------------------------------------------------
Measuretemperature:
'Temperatur auslesen und in Variable Temperature schreiben
'vorher muss Thpinnr gesetzt werden (Nummer des Pins an dem der Sensor hängt)
'Messen
1wreset Pind , Thpinnr
1wwrite &HCC , 1 , Pind , Thpinnr 'alle herhören
1wwrite &H44 , 1 , Pind , Thpinnr 'Messen
Waitus 200
'auslesen
1wreset Pind , Thpinnr
1wwrite &HCC , 1 , Pind , Thpinnr
1wwrite &HBE , 1 , Pind , Thpinnr 'RAM auslesen
Dsread(1) = 1wread(9 , Pind , Thpinnr )
Itemperature = Makeint(dsread(1) , Dsread(2))
Temperature = Itemperature * 0.0625
Return
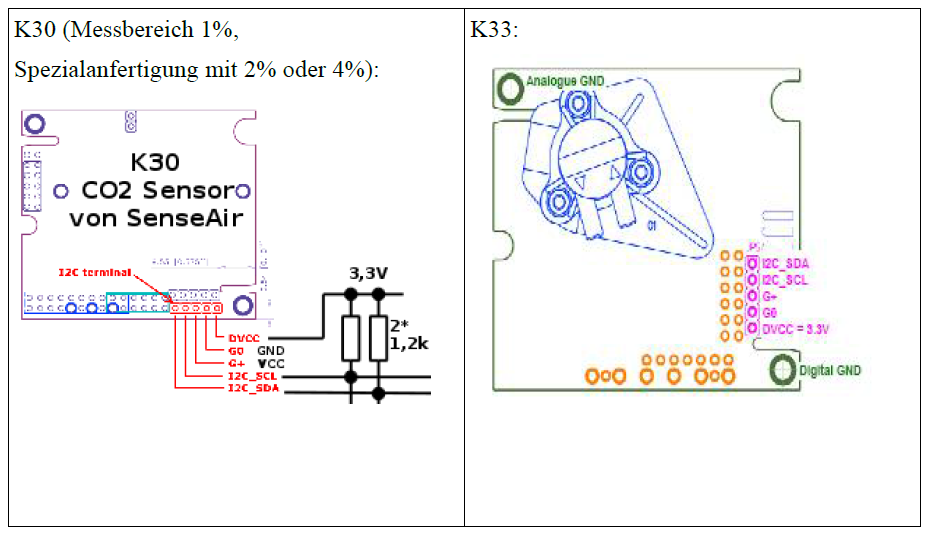
Kommunikation über I2C
Anschluss am I2C-Port des Controllers mit 1.2K- Pullup nach +3.3V
Beim K33 muss der Wert noch mit 10 multipliziert werden.
Testprogramm für CO2-Sensor:
Auslesen des Sensors und Daten über serielle Schnittstelle an einen PC schicken
'CO2-Messung<
'Sensor an I2C
'PC.5 = SCL
'PC.4 = SDA
$crystal = 8000000
$regfile = "m8def.dat"
$hwstack = 50
$baud = 9600
'Enable Urxc
'Enable Interrupts
'On Urxc Rscommand
Config Portd.5 = Output 'LED
'I2C
Config Sda = Portc.4
Config Scl = Portc.5
'CO2-Sensor
Dim Sensorstatus As Byte
Dim Sensorvalue As Word
Dim Sensorvalue_h As Byte At Sensorvalue Overlay
Dim Sensorvalue_l As Byte At Sensorvalue + 1 Overlay
Dim Sensorchecksum As Byte
Dim Secs As Long
'-------------------------------------------------------------------------------
Main:
Do
Secs = Secs + 1
Gosub Measureco2
Print Secs;
Print Chr(9);
Print Sensorvalue;
Print Chr(9);
If Sensorstatus = 1 Then Print "OK" Else Print "Error"
Waitms 1000
Loop
'-------------------------------------------------------------------------------
Measureco2:
'Senseair K30-Sensor über I2C ansprechen
'auf Fehler prüfen (Sensor nicht bereit) durch Auslesen des Statusbytes
'falls nicht bereit: Sensorstatus =0, falls Ok: 1
I2cstart
I2cwbyte 0
I2cstop
Waitms 1
I2cstart
I2cwbyte &HD0 'Adresse (&h68 1 Bit nach links, Bit0=R/W=0 (schreiben)
I2cwbyte &H22 'Read RAM 2 Bytes
I2cwbyte &H00 'Adresse H
I2cwbyte &H08 'Adresse L
I2cwbyte &H2A 'Checksum
I2cstop
Waitms 20
I2cstart
I2cwbyte &HD1 'Lesen an Adresse &h68
I2crbyte Sensorstatus , Ack
I2crbyte Sensorvalue_l , Ack
I2crbyte Sensorvalue_h , Ack
I2crbyte Sensorchecksum , Nack
I2cstop
Sensorstatus = Sensorstatus And 1
Return
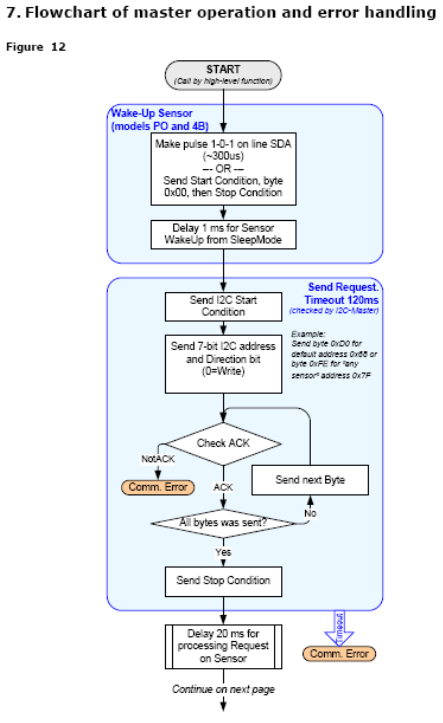
Unterlagen von Senseair zur Programmierung
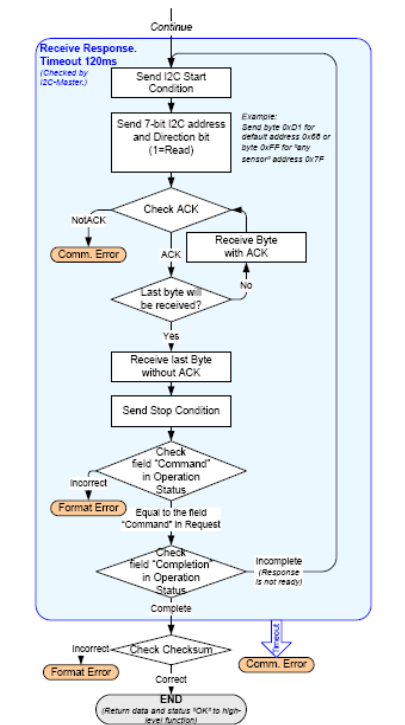
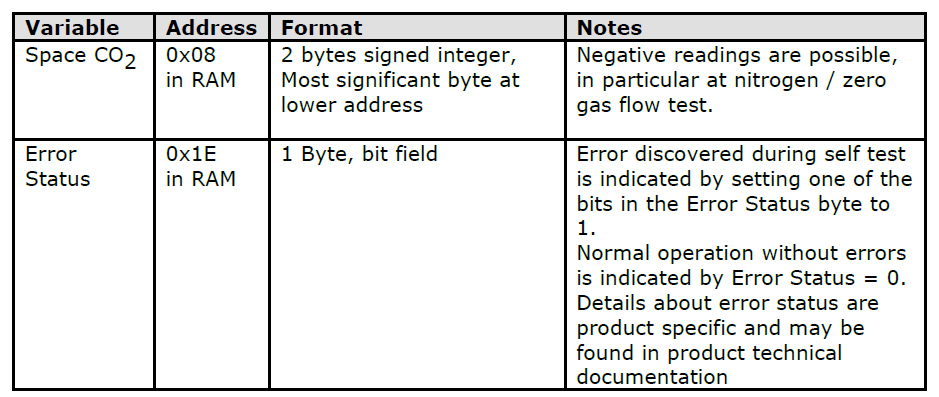
10.1. Example: Reading of CO2 value from sensor
To read the current CO2 concentration from the sensor we need to read memory locations 0x08 (hi byte) and 0x09 (low byte). To do this we need to send a sequence of two I2C frames: first we send an I2C write frame containing the sensor address, command number and how many bytes to read, RAM address to read from, and a checksum. Then we send an I2C read frame to read the status, data and checksum. See chapter 2 for details. In our case we want to read 2 bytes starting from address 0x08. This will give us data from address 0x08 and 0x09, which contains current CO2 reading. The sensor address is 0x68 (default factory setting, configurable in EEPROM). So, the first frame should look like:
Start | 0xD0 | 0x22 | 0x00 | 0x08 | 0x2A | StopA. a. 0xD0 is Sensor address and read/write bit. 0x68 shifted one bit to left and R/W bit is 0 (Write).
B. b. 0x22 is command number 2 (ReadRAM), and 2 bytes to read
C. c. Checksum 0x2A is calculated as sum of byte 2, 3 and 4.
II.
The next frame will read the actual data:
Start | 0xD1 | <4 bytes read from sensor> | Stop
A. d. The 1:st byte from the sensor will contain operation status, where bit 0 tells us if the read command was successfully executed.
B. e. The 2:nd and 3:rd byte will contain CO2 value hi byte and CO2 value low byte.
C. f. The 4:th byte contains checksum
D.
E.
F. 10.2. Example: Start background and zero calibration with I2C commands
III.
In K30 and K50 meters it is possible to start zero and background calibrations with I2C commands.
Background calibration for K30 meters look like this:
Start | 0xD0 | 0x12 | 0x00 | 0x67 | 0x7C | 0x06| 0xFB | Stop
A. a. 0xD0 is Sensor address and read/write bit. 0x68 shifted one bit to left and R/W bit is 0 (Write).
B. b. 0x12 is command number 1 (WriteRAM), and 2 bytes to write
C. c. 0x7C06 is background calibration command
D. d. Checksum 0xFB is calculated as sum of byte 2-6.
Zero calibration for K30:
I2C comm guide 2_10.doc Page 29 of 33
Start | 0xD0 | 0x12 | 0x00 | 0x67 | 0x7C | 0x07| 0xFC | Stop
1. e. 0xD0 is Sensor address and read/write bit. 0x68 shifted one bit to left and R/W bit is 0 (Write).
2. f. 0x12 is command number 1 (WriteRAM), and 2 bytes to write
3. g. 0x7C07 is background calibration command
4. h. Checksum 0xFC is calculated as sum of byte 2-6.
In K50 meters with memory map 8 or lower the zero and background commands are identical to K30 meters. In K50 meters with memory maps higher than 8 the address to write to is moved from 0x67, 0x68 to 0x32, 0x33.
Table 11 Measured value and status